

FRC Calculators
Written by Adrish Kar and Chakshan Kothakota
In our incessant journey of building, experimenting, and prototyping prior to this season of FRC, we can’t stress the importance of calculators enough. These calculators are not your typical scientific or graphing calculator; they are specialized calculators in the form of a Google/Excel spreadsheet that were created for FRC teams to use. With these calculators, teams can determine the values of important parameters of their drivetrain and other mechanisms such as linear speed, torque generated by arms, linear acceleration, etc.
Below, you will find some of the best FRC calculators that have been greatly beneficial for us during our preparatory phase.
JVN Calculator
The JVN calculator is probably one of the best FRC calculators that teams (including us) use due to its brilliant reliability and innumerable options for calculation customization. Below, we have outlined and explained some of the key parameters as well as some resources for understanding calculator operation and more background on these parameters that are instrumental for the betterment and development of an FRC drivetrain.
Resources
Original link: https://johnvneun.com/calc
Video Tutorial: https://www.youtube.com/watch?v=0daQ5q_6BwA
PowerPoint “Calculator Dissection” (.pptx file): https://www.chiefdelphi.com/uploads/default/original/3X/3/d/3da38578778ae156720fc1666fe75acde488accb.pptx

Chart Made by JVN
Parameters Explained
Free Speed: speed of mechanism under no load
Stall Torque: amount of torque needed to stop shaft of motor from moving
Stall Current: current drawn when shaft of motor is stopped from moving
Some background: https://www.chiefdelphi.com/t/what-happens-why-do-motors-stall/38882
Free Current: current drawn by a mechanism when it is run at free speed
Pushing Current Draw Per Motor: the amount of current the robot would draw if it were pushing up against an immovable obstacle. This is the worst case scenario; this amount of current would likely not be draw during practice. The drivetrain can be traction limited. After being blocked by an obstacle, the traction of the wheels would give in and slip since the torque generated by the wheel would exceed the static friction force. There is no right or wrong value, but here are some things to keep in mind:
The main breaker is rated at 120 amps. The combined current draw of all of the motors on the robot must not exceed 120 amps for a period of time.
The fuse on the PDP for larger motors trips at 40 amps
Fuse data sheet: http://www.snapaction.net/pdf/MX5%20Spec%20Sheet.pdf
Motors can burn out if drawing currents above stall current.
The current drawn by the motors can be limited with programming. Depending on how much effort can be dedicated toward monitoring currents in code, this value can be as high or low as can be handled.
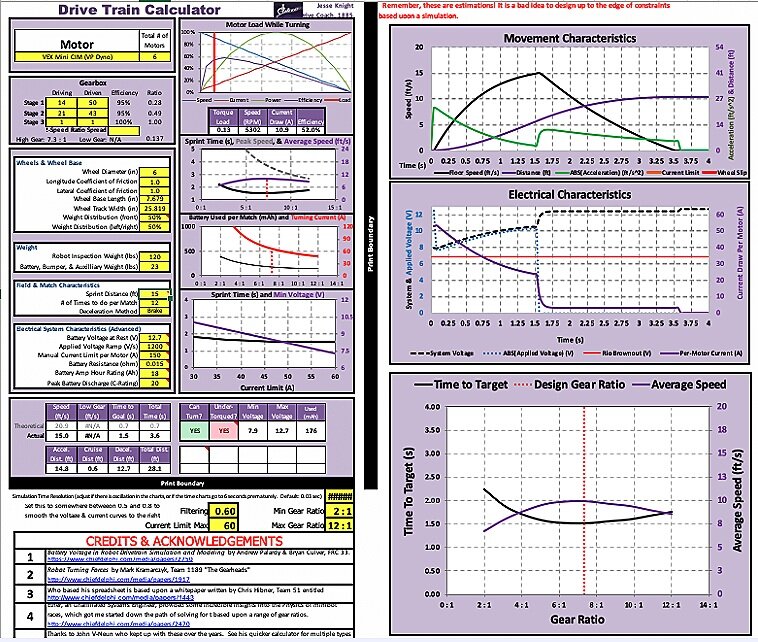
iLITE Calculator
Another amazing FRC calculator is the iLITE calculator. In addition to the same essential parameterized calculations that the JVN calculator can perform, the iLITE calculator also provides its users with amazing visual diagrams (ex. Speed v.s. Time plots) that are very helpful when thoroughly analyzing your drivetrain.
Resources
Chief Delphi Thread: https://www.chiefdelphi.com/t/ilite-drivetrain-simulator-v2020/369188 (With video and download)